
e-Yantra — My Journey of India’s Best Robotics Competition
Published:
I vividly remember the pandemic had begun in March 2020 and I was in my second year of Engineering. Away from the university, caught in our houses, I was extremely inclined towards utilizing my time efficiently by upgrading my skill-set and that is when my friends and I decided to participate in eYRC — India’s most prominent robotics competition which helps thousands of students each year gain industrial skills through project-based learning hosted by the Indian Institute of Technology, Bombay.

Excited to learn new skills while trying to solve a real-life problem, we eagerly waited for our theme allocation — which was Sahayak Bot, a pick and place bot to reduce human labor in the industry. Let’s begin..
Stage 1: Introduction to Robot Operating System (ROS)
Robot Operating System allows complete simulation of the robot in order to check the efficiency of the algorithms before diving into the hardware aspect. Due to this reason, renowned companies like Amazon, Bosch, and Boston Dynamics use ROS in order to reduce any possible losses. One of the best things about ROS is that it is language-agnostic allowing efficient reusability of the code and is supported by great simulation tools — Gazebo and RViz.

The first task was designed to help develop an understanding of the Robot Operating System with the main aim of familiarisation of the same. The objective of the task was to move the turtle-bot in such a way that it completes a full circle using a predefined library — Turtlesim. To solve this task we used basic physics. The distance traveled by the bot equals the circumference and the angular speed has to be changed depending upon the position of the bot. It can be calculated by the formula v = wr.
Stage 2: Introduction to Gazebo and RViz
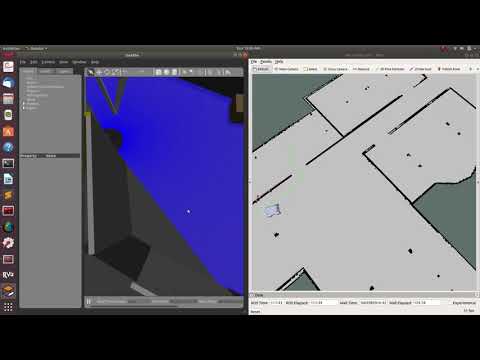
In stage 2, we were familiarized with the Simulation Tools — Gazebo and Rviz which was achieved through a task whose objective was to navigate the bot to the given checkpoints without any collision in the least possible time and hence, finding the shortest path. We used SLAM (Simultaneous Localization and Mapping) to make a map of the arena which helped us differentiate obstacles and free areas. Further Rviz was used to find the path using the Path Module. The process of Path-finding was done in two steps — Locally and Globally. The global path helped the bot find a way between source and destination and the local path helped avoid collision and stick to the global path as much as possible. Results were simulated in Gazebo:
Stage 3: Pick and Place Mechanism
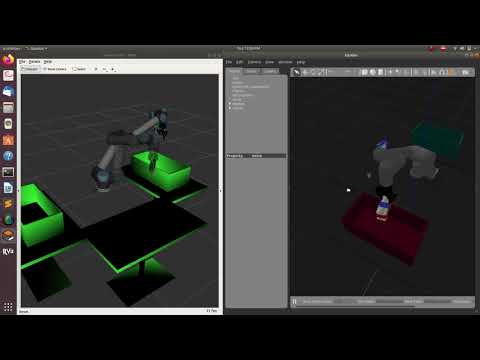
Stage 3 was aimed to develop the Pick and Place mechanism for the bot. The task was to recognize different objects using a 3D camera placed on the URDF arm and pick them and place it on their designated boxes. Image Processing and Computer Vision to detect objects (coke, glue, battery) using YOLOv3. The robotic arm was divided into two parts — Gripper and Arm. For the procedure of picking, an estimated position had to be calculated using the 3D camera and the arm worked accordingly.
Although we didn’t win the competition, however, it was an enriching experience that helped us develop our skills and efficiently utilize our time during the pandemic!